Il sensore PIR (passive infrared sensor) è un sensore molto utilizzato nei progetti con Arduino. Questo sensore misura la radiazione luminosa degli oggetti ed attraverso le sue variazioni rileva la presenza o meno di movimenti nello spazio.
Di fatto è un sistema molto economico e sufficientemente preciso per rilevare la presenza di persone, animali o più in generale di movimenti all’interno di un’area.
Tra i sensori PIR più diffusi per Arduino l’HC-SR501 la fa da padrone. Il sensore in questione è prodotto da diversi manufacturer e a volte differisce per piccoli particolari come il colore o la sagoma della cupola in plastica ma dal punto di vista pratico funziona sempre allo stesso modo. L’HC-SR501 è facilmente reperibile su Ebay o Aliexpress.
Il sensore ha 3 pin di uscita per connetterlo alla board:
Sensore PIR descrizione HC-SR501 VCC (da 5 a 20 volt)
- DATA
- GND.
VCC e GND servono per alimentare il sensore mentre DATA di fatto emette un segnale che è 0 volt se non rileva movimenti e 3v nel momento in cui viene rilevato un movimento nel raggio di azione.
Vediamo le caratteristiche di questo sensore che lo rendono cosi diffuso:
- Prezzo: il sensore PIR HC-SR501 ha un prezzo che si attesta intorno ai 2;3 euro quindi molto economico
- Alimentazione: il sensore va alimentato come da datasheet in un range da 5V a 20V con un assorbimento di corrente di 65mA il che lo rende compatibile con Arduino Uno e famigliari, con WeMosD1 ma non con board come ESP8266-01 o come NodeMcu. Se volete utilizzare queste board alimentate a 3.3 v sappiate che dovete optare per l’alimentazione separata del sensore oppure fare un force abbastanza brutale del sensore che consiste nel bypass
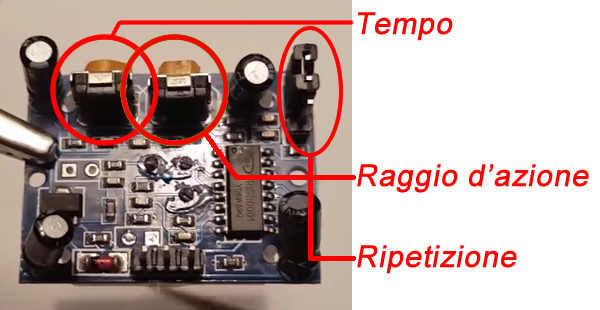
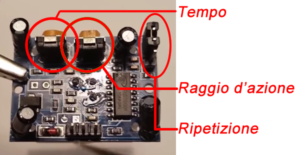
- Tempo di risposta: Il tempo di risposta del sensore (timeout) più essere modificato agendo sulla primo regolatore con un intervallo che va da 5 secondi a 5 minuti. Se portare a 5 minuti il sensore rimarrà ON per 5 minuti. Per aumentare il tempo girare in senso orario per diminuirlo girare la manopola in senso antiorario.
- Raggio d’azione coperto: il sensore puo’ essere calibrato su diversi raggi d’azione attraverso la seconda manopola. Il raggio d’azione va da 3 metri a 7 metri; queste misure sono indicative poichè dipendono dalla conformazione dello spazio intorno al sensore PIR anche in questo caso per aumentare lo spazio girare in senso d’orologio e per ridurre fare il contrario.
- Ripetizione del trigger: nella parte alta del sensore troverete dei morsetti che collegano 2 piedini. In posizione H il trigger è abilitato quindi una volta rilevato il movimento e scaduto il tempo il sensore torna attivo pronto a rilevare un nuovo movimento; in posizione L invece il sensore non torna allo stadio iniziate terminato il time out.
Nel prossimo articolo vedremo lo sketch per utilizzare questo sensore in un caso base.